114學年度全國競賽題目:
(A1)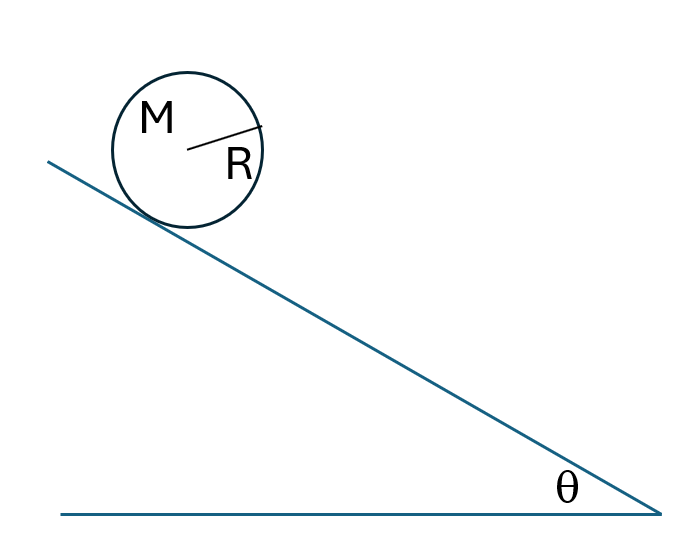
如右圖,質量M、半徑R的圓柱體,從靜止狀態沿斜角\(\theta\)的斜坡平穩滾動而下。假設圓柱體與斜面的靜摩擦係數為\(\mu_s\),請計算要使圓柱體維持滾動無滑動的運動模式,斜角\(\theta\)需要滿足的條件。假設圓柱體的質心轉動慣量\(I=\beta MR^2, \beta=0.7, \mu_s=0.6\),請計算滾動無滑動的臨界角度\(\theta_c\)。
(B1)
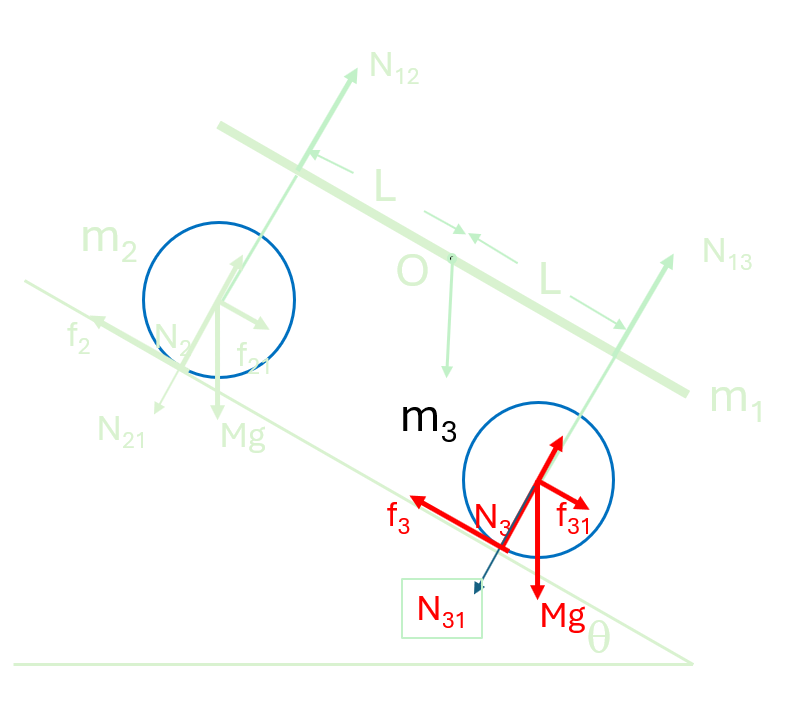
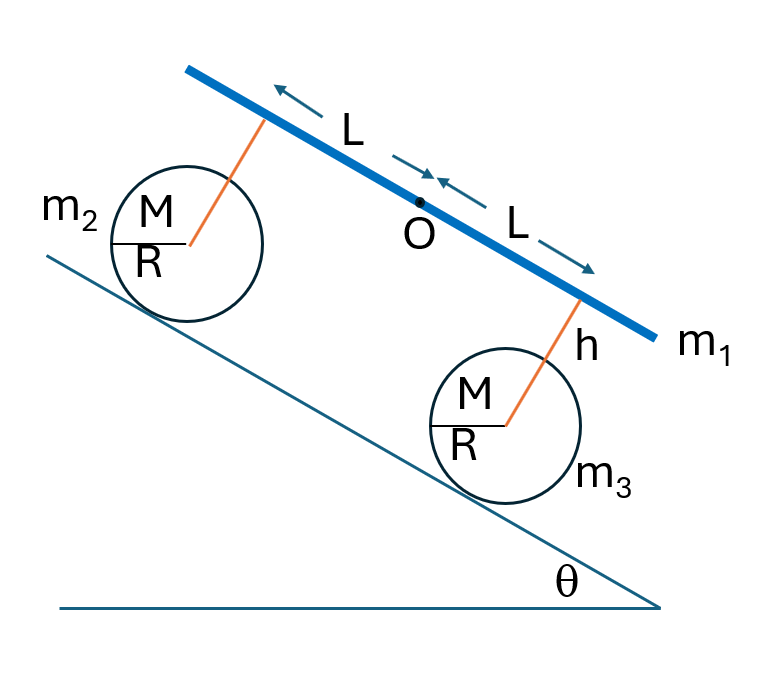 右圖是壓路機的簡化模型,其前(\(m_3\))後(\(m_2\))車輪皆是質量\(M(m_2=m_3=M\)),半徑\(R\),質心轉動慣量\(I=\beta MR^2\)的圓柱體,車身為質量\(m_1(=cM,c \gt 1\))的平台,在如圖所示斜角\(\theta\)的傾斜面上行駛。連接車身與圓柱體軸心的支架長度為\(h\)(即圓柱體中心到車身的距離,支架與圓柱體軸承的質量可忽略。車輛在重力和摩擦力的作用下沿著斜面行駛,前後圓柱體相對於車身對稱放置,\(O\)為車身中點,\(O\)與支架間的距離為\(L\),即前後圓柱體之間的距離為\(2L\),令\(h\)與\(L\)的比值為\(\kappa\),\(\kappa=h/L \lt 1\)。圓柱體與路面之間的靜摩擦係數和動摩擦係數分別為\(\mu_s, \,\, \mu_k\)。假設圓柱體與其軸心間的滾動摩擦可忽略不計。先分析三主要部分\(m_1,m_2,m_3\)的受力情況,分別畫出三部位的力圖。在你的圖中請明確標示下面所定義的正向力,摩擦力,以及重力等作用力向量:
右圖是壓路機的簡化模型,其前(\(m_3\))後(\(m_2\))車輪皆是質量\(M(m_2=m_3=M\)),半徑\(R\),質心轉動慣量\(I=\beta MR^2\)的圓柱體,車身為質量\(m_1(=cM,c \gt 1\))的平台,在如圖所示斜角\(\theta\)的傾斜面上行駛。連接車身與圓柱體軸心的支架長度為\(h\)(即圓柱體中心到車身的距離,支架與圓柱體軸承的質量可忽略。車輛在重力和摩擦力的作用下沿著斜面行駛,前後圓柱體相對於車身對稱放置,\(O\)為車身中點,\(O\)與支架間的距離為\(L\),即前後圓柱體之間的距離為\(2L\),令\(h\)與\(L\)的比值為\(\kappa\),\(\kappa=h/L \lt 1\)。圓柱體與路面之間的靜摩擦係數和動摩擦係數分別為\(\mu_s, \,\, \mu_k\)。假設圓柱體與其軸心間的滾動摩擦可忽略不計。先分析三主要部分\(m_1,m_2,m_3\)的受力情況,分別畫出三部位的力圖。在你的圖中請明確標示下面所定義的正向力,摩擦力,以及重力等作用力向量:
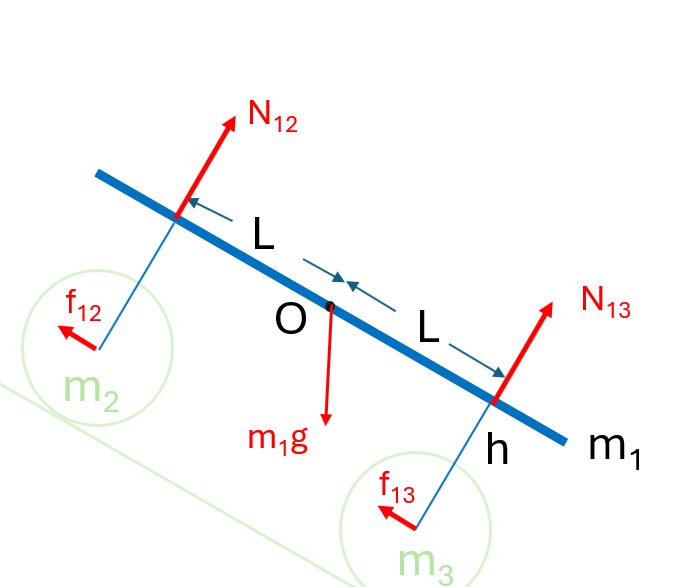
- \(N_{12}\):過後輪(\(m_2\))軸心的支架對車身的正向力。
- \(N_{13}\):過前輪(\(m_3\))軸心的支架對車身的正向力。
- \(f_{12}\):過後輪軸心支架對車身的摩擦力。
- \(f_{13}\):過前輪軸心支架對車身的摩擦力。
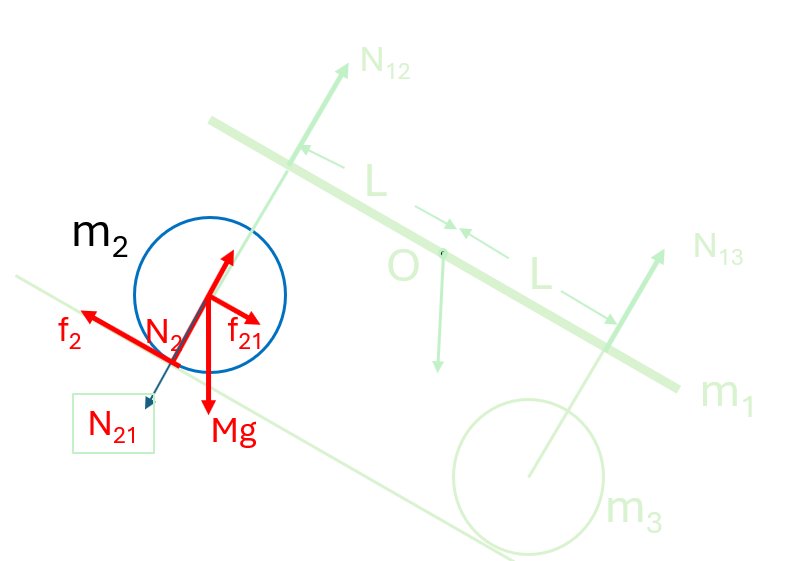
- \(N_{21}\):車身支架對後輪的正向力。
- \(f_{21}\):車身支架對後輪的摩擦力。
- \(N_2\):斜面對後輪的正向力。
- \(f_2\):斜面對後輪的摩擦力。
- \(N_{31}\):車身支架對前輪的正向力。
- \(f_{31}\):車身支架對前輪的摩擦力。
- \(N_3\):斜面對前輪的正向力。
- \(f_3\):斜面對前輪的摩擦力。
(B2)根據(B1)的力圖,以及作用力變數的定義,寫出車身(\(m_1\))、後圓柱體(\(m_2\))和前圓柱體(\(m_3\))的運動方程式。
(B3)假設車輛從靜止開始,在重力作用下進行運動,並且前後圓柱體運動時只有滾動沒有滑動,請推導在此條件下壓路機的線性加速度\(a\)的公式。假設\(m_1=5M\),(即\(c=5\)),\(\beta=0.7\),\(a=\gamma g \sin \theta, \,\,\, \gamma=\)___________。
(B4)若要使前後圓柱體皆為滾動無滑動,請推導斜角\(\theta\)要滿足的條件。設臨界角\(\theta_c\),以\(c=5, \,\, \beta=0.7, \kappa=h/L=0.2, \mu_s=0.6\),計算\(\theta_c\)=_______。
114學年度全國競賽解答:
\(f_s - M g \sin \theta = M a \)
\(R f_s = I \alpha = \beta M R^2 \dfrac{a}{R} \Rightarrow f_s=\beta M a \)
\(\beta M a - M g \sin \theta = M a \Rightarrow \boxed{a=\frac{1}{1+\beta} g \sin \theta} \)
\(f_{s,max}=\mu_s N=\mu_s M g \cos \theta ; \,\,\, f_s \le f_{s,max} \)
\(\beta M a \le \mu_s M g \Rightarrow \beta M \frac{1}{1+\beta} g \sin \theta \le \mu_s M g \cos \theta\)
\( \tan \theta_c = \mu_s \dfrac{1+\beta}{\beta}=(0.6) \dfrac{1+0.7}{0.7}=1.457\)
\( \theta_c=55.5^{\circ}\)
 | |
 | |
 |
\(9個方程式:\)
- \(m_1\) \(m_1 g \sin \theta - f_{12} -f_{13} = m_1 a \) --(1)
- \(m_2\) \(f_{21}-f_2+Mg \sin \theta = Ma \)--(4)
- \(m_3\) \(f_{31}-f_3+Mg \sin \theta = Ma \)--(7)
\(m_1 g \cos \theta = N_{12} + N_{13} \)--(2)
\(N_{12} L - N_{13}L + f_{12} h + f_{13} h = 0 \) --(3)
\(N_2-N_{21}-Mg \cos \theta =0 \)--(5)
\(f_2 R = I \alpha_2=I\dfrac{a}{R} \Rightarrow f_2=\frac{\beta M R^2}{R^2}a=\beta M a \)--(6)
\(N_3-N_{31}-Mg \cos \theta =0 \)--(8)
\(f_3 R = I \alpha_3=I\dfrac{a}{R} \Rightarrow f_3=\frac{\beta M R^2}{R^2}a=\beta M a \)--(9)
\(9個變數:a,N_{12}, N_{13}, f_{12}, f_{13}, f_2, N_2, f_3, N_3\),9個方程式可解\(a\)。
(4)+(7): \(f_{12}+f_{13}=2Ma+f_2+f_3-2Mg \sin \theta \)---(10)
(6)+(9): \(f_2+f_3=2 \beta M a\)---(11)
(1,10) \(\Rightarrow m_1 g \sin \theta - (2Ma+f_2+f_3-2Mg \sin \theta) = m_1 a \) --(12)
(12,11) \(\Rightarrow m_1 g \sin \theta - (2Ma+ 2 \beta M a -2Mg \sin \theta) = m_1 a \) --(13)
\(\Rightarrow (m_1+2M) g \sin \theta = (m_1+2M+2 \beta M) a \) --(14)
If we take \(m_1=5M, \,\, c=5, \text{and} \,\, I=0.7MR^2, \,\, \beta=0.7\), then
\( a=\dfrac{5+2}{5+2+2(0.7)} g \sin \theta=\gamma g \sin \theta, \,\,\, \gamma=\dfrac{c+2}{c+2+2(\beta)}=0.833 \) --(15)
考慮後圓柱體滾動無滑動,後圓柱體與斜面間的靜摩擦必須小於最大靜摩擦:
\(f_2 \le f_{s,max}=\mu_s N_2\) -- (16)
eq.(6):
下面我們會推導出\(N_2\)滿足的方程式如下:
\(\kappa=\frac{h}{L} \)
將(17,18)代入(16):
\( \beta M a \le \mu_s \frac{c+2}{2} M g \cos \theta - \mu_s \kappa [(\beta + 1) M a + M g \sin \theta] \)
\( \beta M a + \mu_s \kappa [(\beta + 1) M a \le \mu_s [\frac{c+2}{2} M g \cos \theta + \kappa M g \sin \theta] \)
\( [\beta + \mu_s \kappa (\beta + 1)] M a \le \mu_s [\frac{c+2}{2} M g \cos \theta + \kappa M g \sin \theta] \)
\( [\beta + \mu_s \kappa (\beta +1)] M \gamma g \sin \theta \le \frac{c+2}{2} \mu_s \cos \theta + \kappa \mu_s \sin \theta\)
\( (\beta \gamma + (\beta + 1) \mu_s \gamma \kappa - \mu_s \kappa) \sin \theta \le \frac{c+2}{2} \mu_s \cos \theta \)
若\(c=5, \,\, \beta=0.7, \,\, \gamma=0.833 \)
\( \tan \theta = \dfrac{3.5 \mu_s}{0.7(0.833)+[(0.7+1)(0.833)-1] \mu_s \kappa}=\dfrac{3.5 \mu_s}{0.581 + 0.416 \mu_s \kappa} \)
若\(c=5, \,\, \beta=0.7, \,\, \gamma=\dfrac{c+2}{c+2+2\beta}=0.833, \,\, \mu_s=0.6, \,\, \kappa=h/L=0.2\)
\(\tan \theta \le \dfrac{3.5(0.6)}{0.581+0.416(0.6)(0.2)}=3.317 \\ \theta_c = \tan^{-1} 3.317=73.3^{\circ}\)
\(N_2-N_{21}-Mg \cos \theta =0 \)--(5)
\(N_3-N_{31}-Mg \cos \theta =0 \)--(8)
(5)+(8): \(N_2 + N_3 - (N_{12}+N_{13})-2 Mg \cos \theta=0 \)
(5)-(8): \(N_2 - N_3 = N_{12}-N_{13} \) -- (19)
\(N_2 + N_3 = (N_{12}+N_{13})+2 Mg \cos \theta \)
eq.(2) : \(N_{12}+N_{13}=m_1 g \cos \theta \)
\(N_2 + N_3 = m_1 g \cos \theta +2 Mg \cos \theta=(m_1+m_2+m_3) g \cos \theta \) -- (20)
eq.(3) : \( N_{12}-N_{13}=-\frac{h}{L} (f_{12}+f_{13})\)
eq.(19,4,7): \(N_2-N_3=-\frac{h}{L} (f_{12}+f_{13}) \\ =-\frac{h}{L}(f_2+f_3-2Mg \sin \theta +2Ma) \\ =-\kappa (2 \beta M a +2Ma-2Mg \sin \theta)\)
\( [(N_2-Mg \cos \theta) - (N_3 - Mg \cos \theta)]L = -h(f_{12}+f_{13}) \)
\( (N_2-N_3)-2Mg \cos \theta = -\frac{h}{L}(f_{12}+f_{13}) \)
(4,8) : \(f_{12} + f_{13}=f_2+f_3 -2Mg \sin \theta +2Ma\)
\( f_2 + f_3 = 2\beta Ma \)
\( N_2-N_3=2Mg \cos \theta -\frac{h}{L}(2\beta Ma -2Mg \sin \theta +2Ma ) \) -- (21)
eq.(20)+(21): \(2N_2=(c+2)Mg \cos \theta - \kappa (2 \beta M a + 2 M a -2Mg \sin \theta)\)